Ziqi LuI am an Applied Scientist at the Frontier AI & Robotics team of Amazon. Before joining Amazon, I received my PhD from MIT CSAIL, under the supervision of Prof. John Leonard. During my PhD, I interned at Meta Reality Labs, Amazon AWS AI and NVIDIA Research. My research focuses on robotic perception, 3D computer vision and machine learning. I am particularly interested in developing robust and object-aware robot perception and mapping systems. I received my M.S.('19) degree from the University of California, Berkeley and B.S.('17) degree from Shanghai Jiao Tong University. Email / GitHub / Google Scholar / LinkedIn |

|
News[Feb 2025] LoRA3D has been selected as a Spotlight in ICLR 2025 (scored in the top 2%) 🚀. [Jan 2025] Our work on LoRA3D: Low-Rank Self-Calibration of 3D Geometric Foundation Models has been accepted to ICLR 2025. [Jan 2025] Our work on 3DGS-CD: 3D Gaussian Splatting-based Change Detection for Physical Object Rearrangement has been accepted to IEEE RA-L. [Dec 2024] I joined the Frontier AI & Robotics team of Amazon as an Applied Scientist! [Nov 2024] I successfully defended my PhD thesis Addressing Challenges in Object-Based Robot Navigation and Mapping. [Oct 2023] I'll be joining the Autonomous Vehicle Research Group of NVIDIA as a research intern in Spring 2024![Apr 2023] I'll be joining the Octant team of Amazon AWS AI as a research scientist intern this summer! [Dec 2022] Check out our Awesome-Object-SLAM repo for a list of object SLAM papers and resources. [Jul 2022] Our work on SLAM-Supported Self-Training for 6D Object Pose Estimation has been accepted to IROS 2022. [Apr 2022] Our work on Discrete-Continuous Smoothing and Mapping has been selected for the spotlight session (top 2 of 48) in the ICRA 2022 workshop on Robotic Perception and Mapping: Emerging Techniques. [Jan 2022] I'll be joining the Surreal team in the Meta Reality Labs as a research scientist intern this summer! [Jul 2021] Our work on Consensus-Informed Optimization Over Mixtures for Ambiguity-Aware Object SLAM has been accepted to IROS 2021. |
Selected Publications |
|
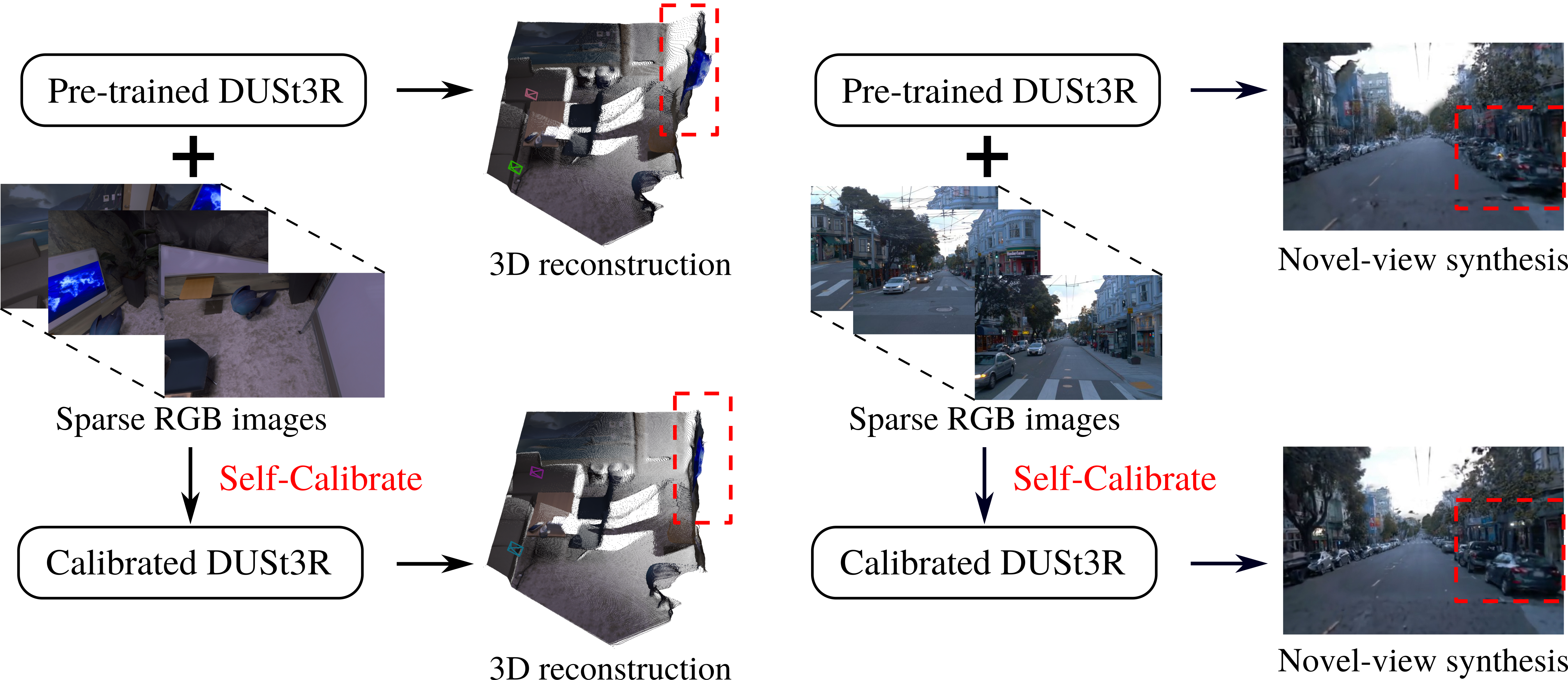
LoRA3D: Low-Rank Self-Calibration of 3D Geometric Foundation ModelsZiqi Lu, Heng Yang, Danfei Xu, Boyi Li, Boris Ivanovic, Marco Pavone, Yue Wang ICLR Spotlight , 2025 arxiv / website / Self-specialization of 3D geometric foundation models (e.g. DUSt3R) to target scenes using sparse RGB images on a single GPU within just 5 min. |
|
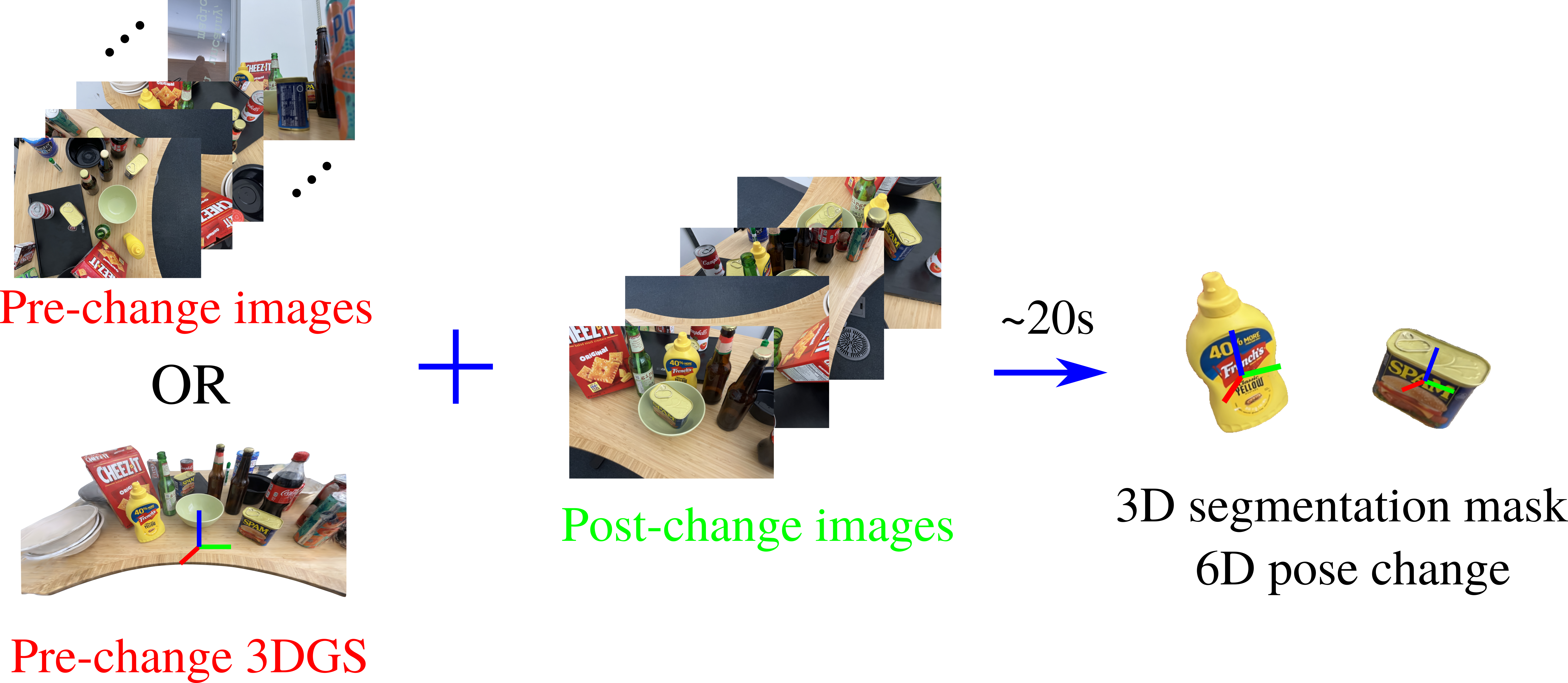
3DGS-CD: 3D Gaussian Splatting-based Change Detection for Physical Object RearrangementZiqi Lu, Jianbo Ye, John Leonard RA-L, 2025 arxiv / code / We estimate 3D object-level changes in 3DGS-represented scenes using sparse post-change images, within tens of seconds. |
|
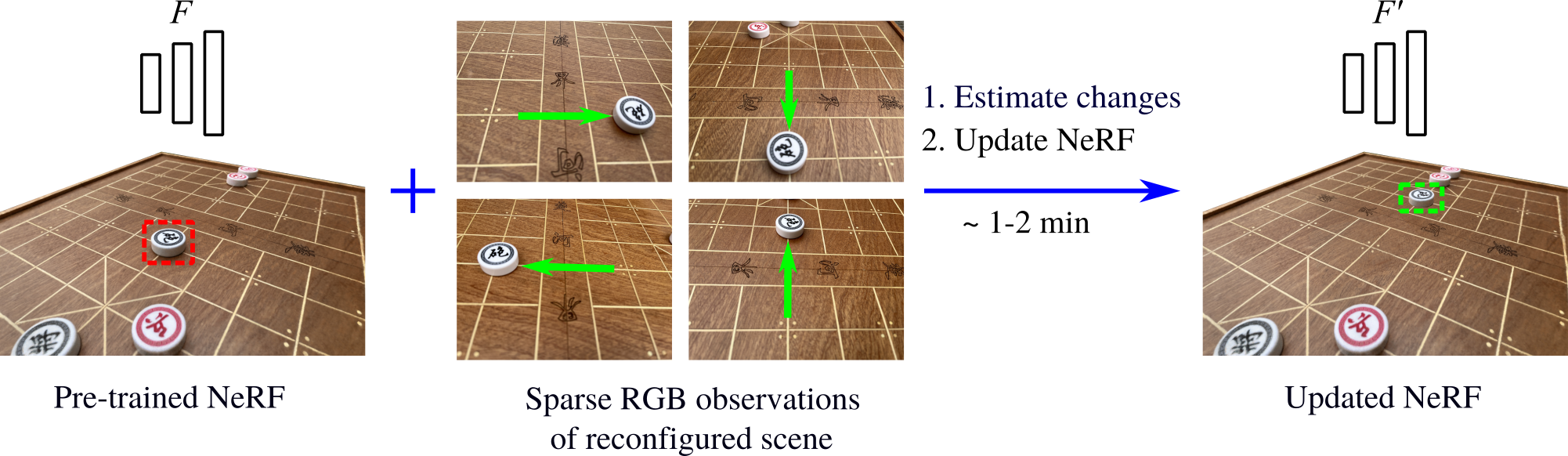
Fast Sparse View Guided NeRF Update for Object ReconfigurationsZiqi Lu, Jianbo Ye, Xiaohan Fei, Xiaolong Li, Jiawei Mo, Ashwin Swaminathan, Stefano Soatto ArXiv, 2024 arxiv / website / Update NeRFs under sparse view guidance to physical object reconfigurations. |
|
SLAM-Supported Self-Training for 6D Object Pose EstimationZiqi Lu, Yihao Zhang, Kevin Doherty, Odin Severinsen, Ethan Yang, John Leonard IROS, 2022 arxiv / code / A robust-pose-graph-optimization-aided self-training method for domain adaptation of 6D object pose estimators. |
|
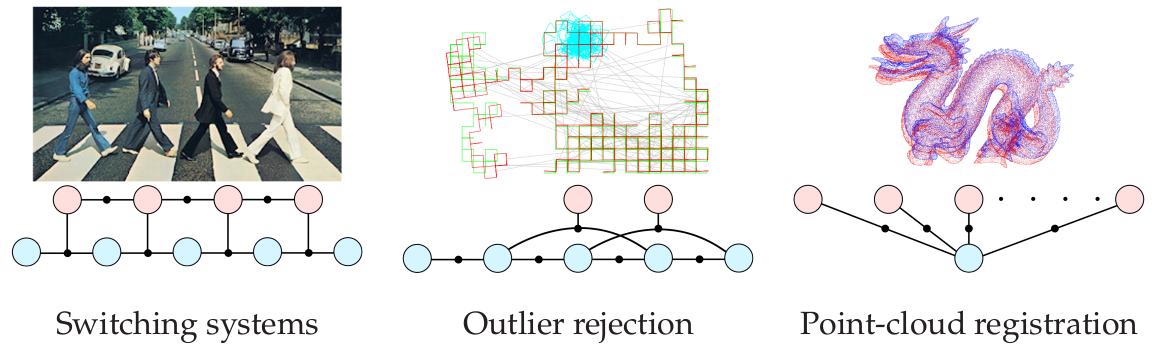
Discrete-Continuous Smoothing and MappingKevin Doherty, Ziqi Lu, Kurran Singh, John Leonard RA-L, 2022 arxiv / video / code / Selected for the spotlight session (top 2 of 48) in the ICRA 2022 workshop on Robotic Perception and Mapping: Emerging Techniques. A novel solver to efficiently recover approximate solutions for discrete-continuous (hybrid) factor graph optimization problems in robotic applications. |
|
Consensus-Informed Optimization Over Mixtures for Ambiguity-Aware Object SLAMZiqi Lu*, QiangQiang Huang*, Kevin Doherty, John Leonard IROS, 2021 paper / arxiv / video / A real-time object-based SLAM system that is robust to symmetry- or occlusion-induced pose ambiguity from individual 6D object pose predictions. |
|
Design and source code from Leonid Keselman's Jekyll fork of Jon Barron's website |